



Motorreductor DC 3-12V Eje Dual 48:1
$24.00
Rantec
Sku: MOT-48
Codigo: 175
Agotado
El Motorreductor para proyectos con Arduino es un dispositivo electromecánico que te permite reducir la velocidad a un alto par. Excelente tracción sobre una gran variedad de superficies estos motorreductores con eje dual están disponibles con una caja reductora de 48:1 y 120:1.
Este Motorreductor es ideal para crear tu propio carrito, se utilizan en la realización de plataformas robóticas. Si estás pensando en construir un robot de sumo, un robot seguidor de líneas, o cualquier robot con tracción diferencial, este motorreductor es ideal para darle movimiento a tu creación. El motorreductor NO INCLUYE LLANTA.
ESPECIFICACIÓN Y CARACTERÍSTICAS
- Tipo: Motorreductor
- Dirección del eje: Bidireccional
- Reducción: 48:1
- Voltaje de alimentación: 3V ~ 6V DC
- Corriente sin carga:
- 3V: 80mA
- 5V: 90mA
- 6V: 120mA
- Corriente máxima de paro (Eje detenido):
- 3V: 500mA
- 5V: 850mA
- 6V: 950mA
- Velocidad sin carga Aprox.:
- 230 RPM Máximo
- Torque Máximo:
- 0.7 kg.cm Aprox. (Dependerá del voltaje y la carga que se aplique al eje)
- Diámetro del eje de salida: 5.3 mm y aplanado a 3.6
- Peso: 26 g
TUTORIALES
- Control de carrito 4WD mediante aplicación app
- Kit básico arduino/ robot carro + modulo L298N
- Armado del kit carrito 4WD robot seguidor líneas
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
¿Cómo funciona el motorreductor?
Los reductores y motorreductores son mecánicos de velocidad, mientras que un motorreductor tendrá un motor acoplado directamente, el reductor no tiene un motor acoplado directamente.
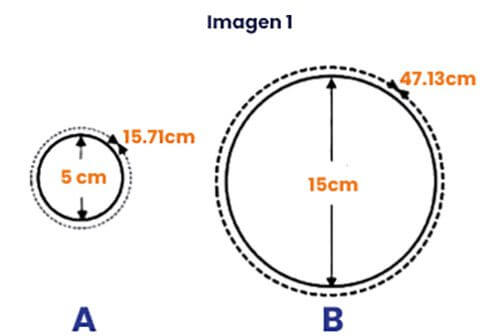
El principio de trabajo del motorreductor se basa e la relaciona que tienen internamente de los engranes. Supongamos que la rueda “A” tiene un diámetro de 5cm con un perímetro de 15.71(P=dxπ) y una rueda “B” de 15cm de diámetro con 47.13, la cual esta haciendo contacto con la rueda “A”. Imagen 1
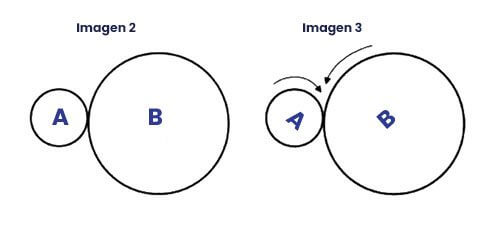
Como se muestra en la imagen 3, cuando gira la rueda “A” hará que a su vez gire la rueda “B” pero sucederá que por cada tres vueltas que dé “A”, la rueda “B” solamente dará una vuelta, esto es, el diámetro de “B” dividido por el diámetro de “A” (15/5 = 3). Este número 3 será la relación de reducción del motorreductor elemental y se indica como 3:1.
Con esta simple combinación se ha logrado disminuir la velocidad de rotación de la rueda “B” a la tercera parte de la velocidad de la rueda “A”. Si a la combinación de ruedas antes descrito encadenamos otras ruedas adicionales entonces cada vez lograremos una velocidad cada vez menor hasta donde sea necesario para la aplicación y puede ser 6:1, 30:1, 100:1 o aún mayor para lograr velocidades muy pequeñas que se pudieran necesitar y que, por ejemplo, la rueda “A” tuviera que girar cientos de veces para que la última rueda girara una sola vez.
En este caso tendremos un motorreductor de varios trenes de reducción, entendiendo como 1 tren de reducción a un par de ruedas.
Con este sistema de reducción no solamente disminuimos la velocidad de “B” a un giro más lento que es útil para la mayoría de las aplicaciones sino que al mismo tiempo estaremos aumentado el “par” o “torque” en la última rueda del motorreductor que generalmente se conoce como la rueda de salida a la que va ensamblada la “flecha de salida” del reductor o motorreductor.
¿Cómo se puede realizar la conexión entre tarjetas de desarrollo y motorreductores?
Si se conecta el motorreductor directamente a cualquier tarjeta de desarrollo pueden pasar alguna de estas situaciones:
- El motorreductor este inactivo.
- Que funcione, pero se calienta el microcontrolador de la tarjeta de desarrollo.
- Quemar el microcontrolador, por la demanda de corriente.
Para ello es preferible usar: Puente H o Shield Puente H.
ENLACES EXTERNOS
| Peso | 0.0260 kg |
|---|---|
| Dimensiones | 0.0000 × 0.0000 × 0.0000 cm |
Productos relacionados


Motor DC y Motorreductores
Steren Sku: MOT-125

Motor DC y Motorreductores
Steren Sku: MOT-145

Motor DC y Motorreductores
Steren Sku: MOT-160