

Modulo Puente H L298 Driver Motor
$49.00
Rantec
Sku: M-L298
Codigo: 11
Agotado
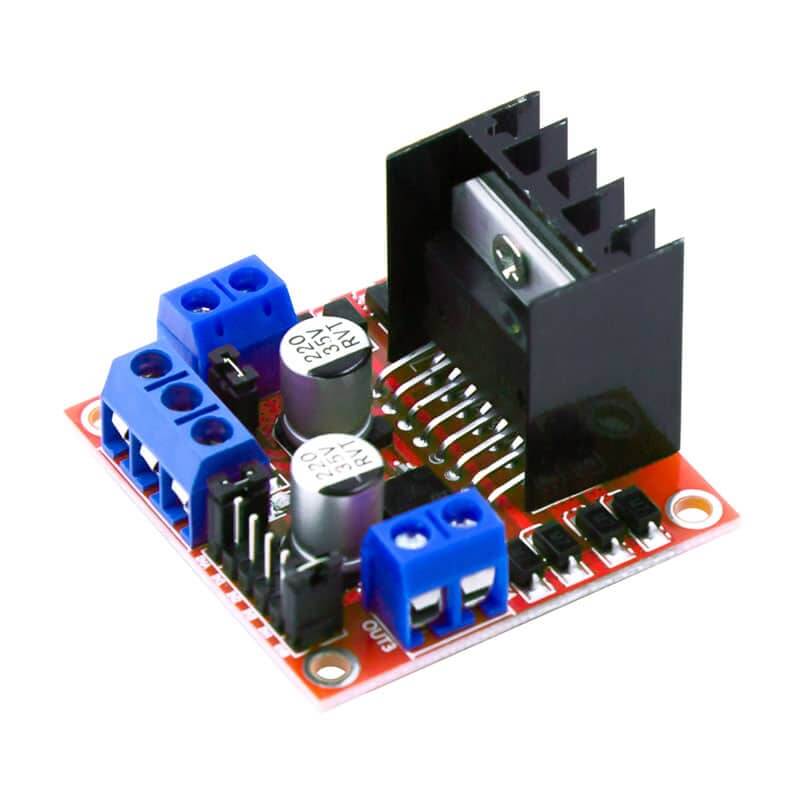
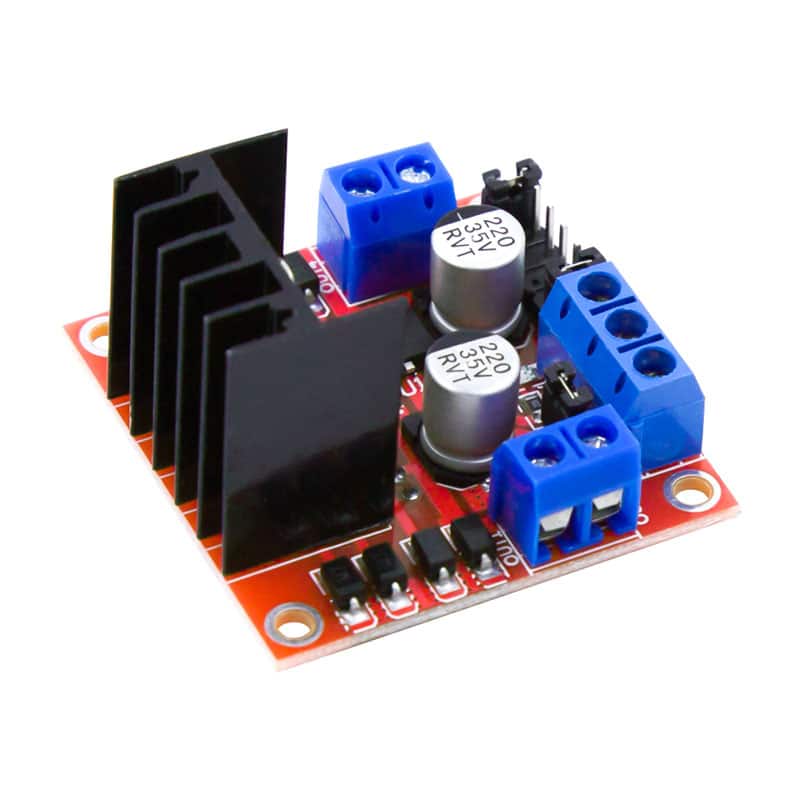
El Modulo Puente H L298 Motor a pasos posee dos puentes H que permiten controlar 2 motores DC o un motor paso a paso bipolar/unipolar. Tiene integrado un regulador de voltaje de 5 volts encargado de alimentar la parte lógica del L298N, el uso de este regulador se hace a través de un jumper y se puede usar para alimentar la etapa de control.
El Modulo Puente H L298 es útil para controlar motores hasta 2A controlando el sentido de giro y velocidad mediante señales TTL que se pueden obtener de microcontroladores y tarjetas de desarrollo como Arduino, Raspberry Pi y Launchpads de Texas Instruments.
El Modulo Puente H L298 es utilizado para controlar y mover motores DC. Es un controlador de motor bidireccional, lo que significa que puede hacer que un motor gire en sentido horario o antihorario.
El Modulo Puente H L298 se compone de dos canales de control de motor, cada uno capaz de controlar un motor DC independiente. Cada canal tiene dos entradas de control: una para el sentido de giro del motor y otra para la velocidad. Estas entradas se controlan mediante señales digitales, lo que significa que pueden ser fácilmente controladas por un microcontrolador o una placa de desarrollo como Arduino.
Además de controlar los motores DC, el L298N también tiene la capacidad de protegerse a sí mismo y a los motores contra sobrecorrientes y sobrecalentamientos. Esto lo convierte en una opción ideal para proyectos que involucren motores DC de alta potencia.
ESPECIFICACIONES Y CARACTERÍSTICAS
- Chip: L298N
- Voltaje:
- De alimentación: 5 V
- Lógico: 5 V
- Operación: 5 V a 35 V
- Consumo de corriente digital: 0 a 36 mA
- Capacidad de corriente: 2A (picos de hasta 3A)
- Potencia máxima: 25 Watts
- Canales: 2 (soporta 2 motores DC o 1 motor paso a paso)
- Dimensiones: 43mm x 43 mm x 27mm
- Peso: 28 g
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
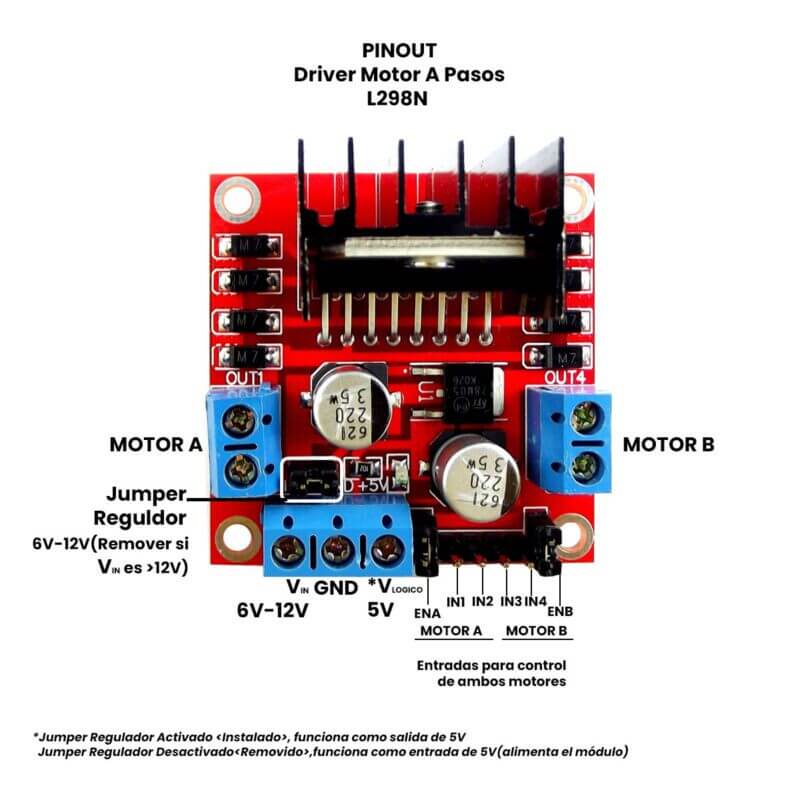
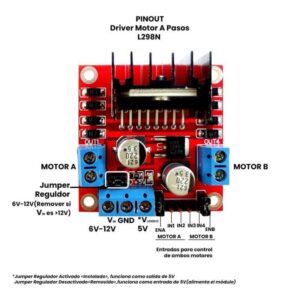
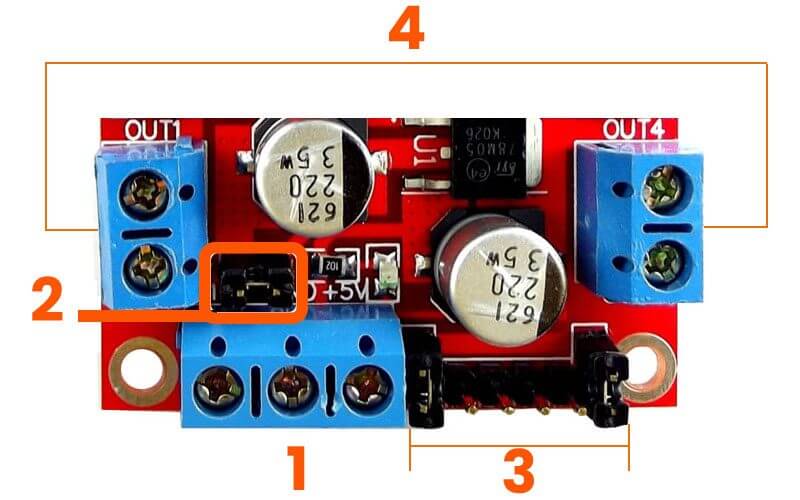
Explicación de Pines del L298N
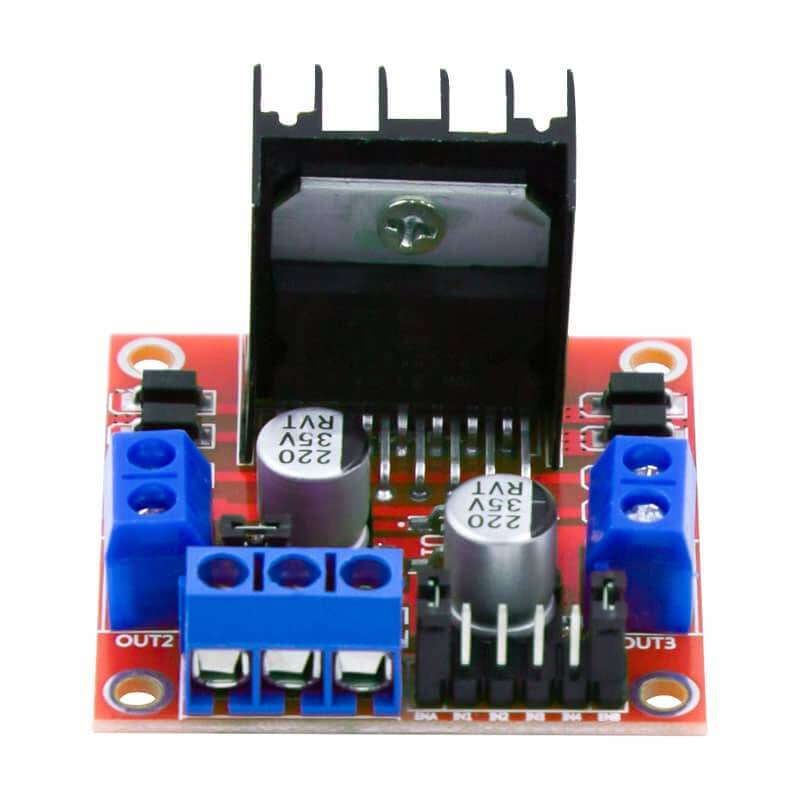
- Bornera de 3 pines para la alimentación del módulo VIN:+12V, GND y VLOGICO: +5V.
- Conector de 2 pines para el jumper de control del regulador de voltaje.
- Conector de 6 pines para el ingreso de señales TTL para el control de los motores (ENA, IN1, IN2, IN3, IN4 y ENB)
- Dos borneras de 2 pines para la salida a los motores.
Alimentación del Módulo L298N
- Usando una sola Fuente: Conectada a la entrada VIN de 6-12V y con el Jumper para habilitar el regulador, aclarando que el voltaje de la fuente es el que soporta el motor. De esta forma la entrada de VLOGICO 5V no debe estar conectada a ninguna fuente, ya que en este pin están presentes 5V a través del regulador interno; pero puedes utilizar este pin como una salida de 5V, pero sin exceder los 500mA de consumo. Se recomienda hacer esta conexión para voltajes menores de 12V para no sobrecalentar el regulador.
- Usando 2 fuentes: una de 5V conectada a la entrada VLOGICO 5V (puede ser los 5V de un Arduino) y otra fuente con el valor del voltaje que trabaja el motor VIN, conectada al pin de 12V. Para esto se tiene que desconectar el Jumper lo que deshabilitará al regulador.
En otras palabras, con el Jumper de Control (2), el pin de 5V funciona como salida de 5V apoyando a la alimentación de alguna tarjeta de desarrollo. Sin el Jumper, el pin de 5V funciona como entrada, por lo cual se debe alimentar al modulo con 5V, para poder alimentar la lógica del modulo L298N
NOTA: No conectes tensión de entrada al pin de +5V si tienes activado el regulador de tensión con el jumper colocado porque puedes provocar un corto y es posible que se dañe módulo.
Ten en cuenta que debes conectar el GND del motor driver con el GND de Arduino para que el circuito funcione correctamente.
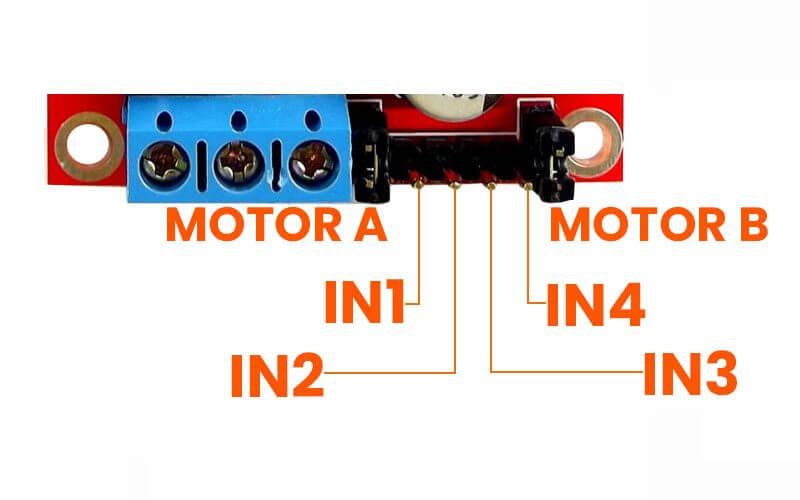
Control de lógica del L298N
El módulo L298N se controla desde una bornera de 6 pines. Los pines IN1, IN2 corresponden a las entradas de la bornera del MOTOR A (OUT1 y OUT2). Mientras que IN3, IN4 permiten controlar las entradas de la bornera del MOTOR B (OUT3 y OUT4) respectivamente.
Los pines ENA y ENB tienen un jumper a +5V y sirven para controlar la velocidad de los motores ingresando una señal PWM. Si no deseamos controlar la velocidad del motor debemos conectar el jumper, por el contrario, si queremos controlar la velocidad debemos retirar el jumper.
ENLACES EXTERNOS
| Peso | 0.0255 kg |
|---|---|
| Dimensiones | 4.3000 × 4.3000 × 2.7000 cm |
Productos relacionados